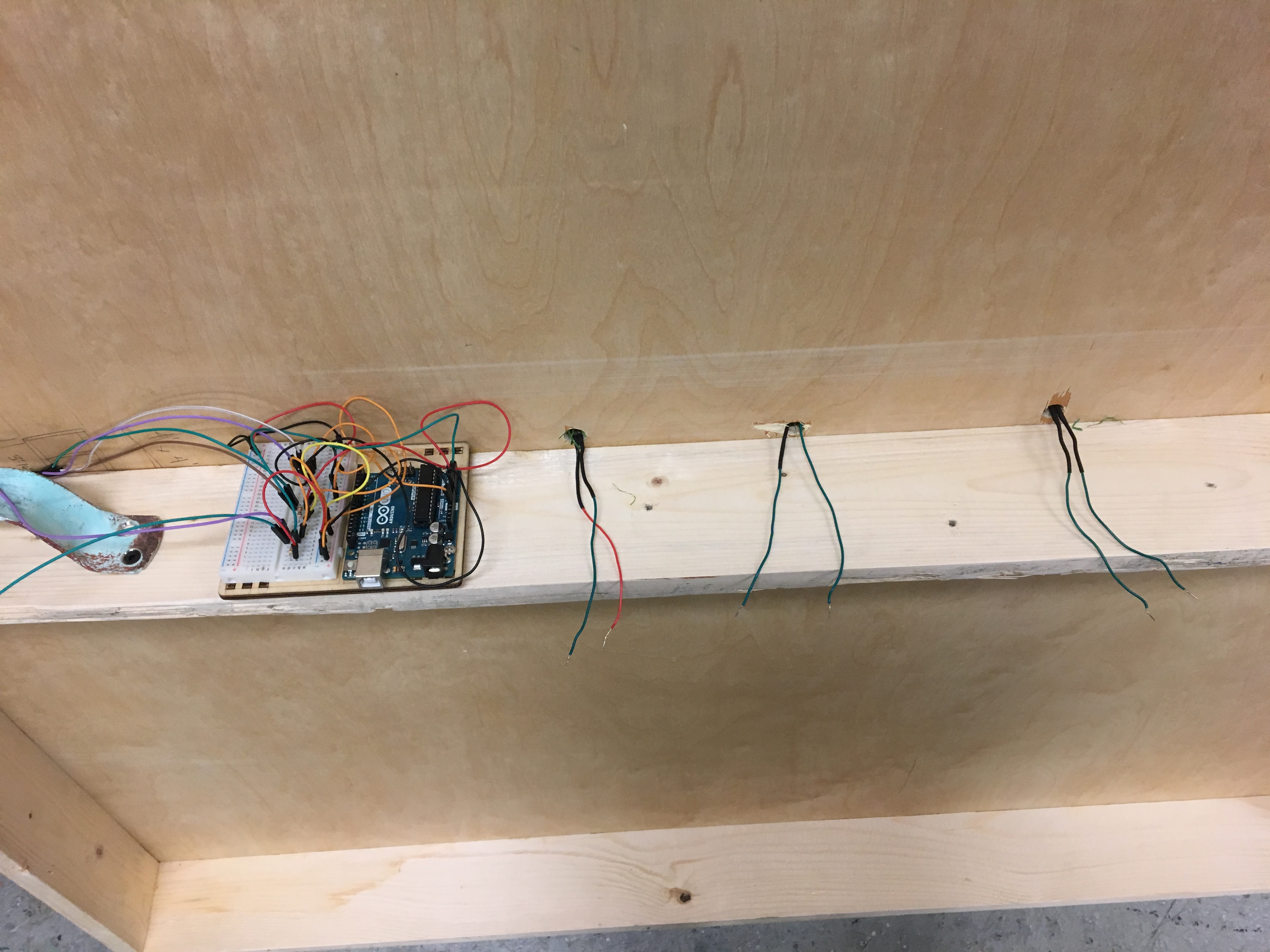
The final step in the process was the perf board. The arduino and Bluetooth that was hooked up to it were going to be moving around a LOT as they are in the main shaft of the bat. Not only do they need to be very stabilized to the bat but the connections need to be super stabilized as well. My first perf board was an utter failure. My second was a success but the header pins on the male to female wires kept breaking off. By my third perf board I became a soldering pro though and I feel like it looks and works pretty well.
With everything done, Grant and I had a few hours to test out all the components together. While we were thrilled that they were working together, there is one area where there could be some improvement: the vibrating motor sensor. We just cannot get it to vibrate at the right time. It seems like there is too much happening even with all of the console logs removed. Perhaps it’s because there is too much in the preload but even when I removed the music files, there was still significant lag. At this point, I’m at a loss and I hope to pick your brain about how I can better correct this in the future.
At the end of the day, this has been an amazing project to work on. It’s so bizarre to look back on that first sketch I did about baseball and think about how far I’ve come. There are so many people that deserve acknowledgement: Joe Mango, Shawn Van Every, Tom Igoe, Dan O’Sullivan and Dan Shiffman, Kat Sullivan, Jingwen Zhu, Justin Peake, Or Fleischer, and I’m sure there are more. Of course, none of this would have happened if not for the dedication and commitment of my partners Grant Henry and Katie Takacs.
I was sitting in Maryland over Thanksgiving. Grant and Katie had decided to get together the weekend after to work on fabrication while I took a few extra days and focused on the coding side of things. At one point, I got a text from them. It was a photo of that grass batters box. I couldn’t believe it; I had a grin from ear to ear. It was so noticeable my dad asked me what was up. I turned my phone to him and showed him the photo. I was just blown away by how awesome it was. “Man,” he said, “this is some group you got, huh?” It sure was.